该测试的目的是检查 CAN 总线通讯是否会受到来自高频、快速开关、高压系统和组件的电磁干扰 (EMI),该测试使用数学通道来确认 CAN 高 (CAN-H) 和 CAN 低 (CAN-L) 之间的差分信号在 EMI 存在时是否保持不变。
警告
该测试涉及到具有以下条件的高压电气系统:
- 能够造成致命电击的高压组件和电缆。
- 储存的电能有可能引起爆炸或火灾。
- 即使在关闭时仍可能保持危险电压的组件。
- 可能影响心脏起搏器等医疗设备。
请参阅制造商提供车辆的特定信息来源,以确定您需要采取哪些预防措施以防止危险。
只有接受过“合格电工”等适当类型的特定培训并持有有效认证的合格技术人员才能执行此测试。
如何进行测试
- 使用汽车技术手册,找到车辆DLC(诊断连接器)的16针脚插头。在CAN网络易连接的地方找到CAN-H和CAN-L的针脚。(通常在网络上的每个ECU的多路接头上。)
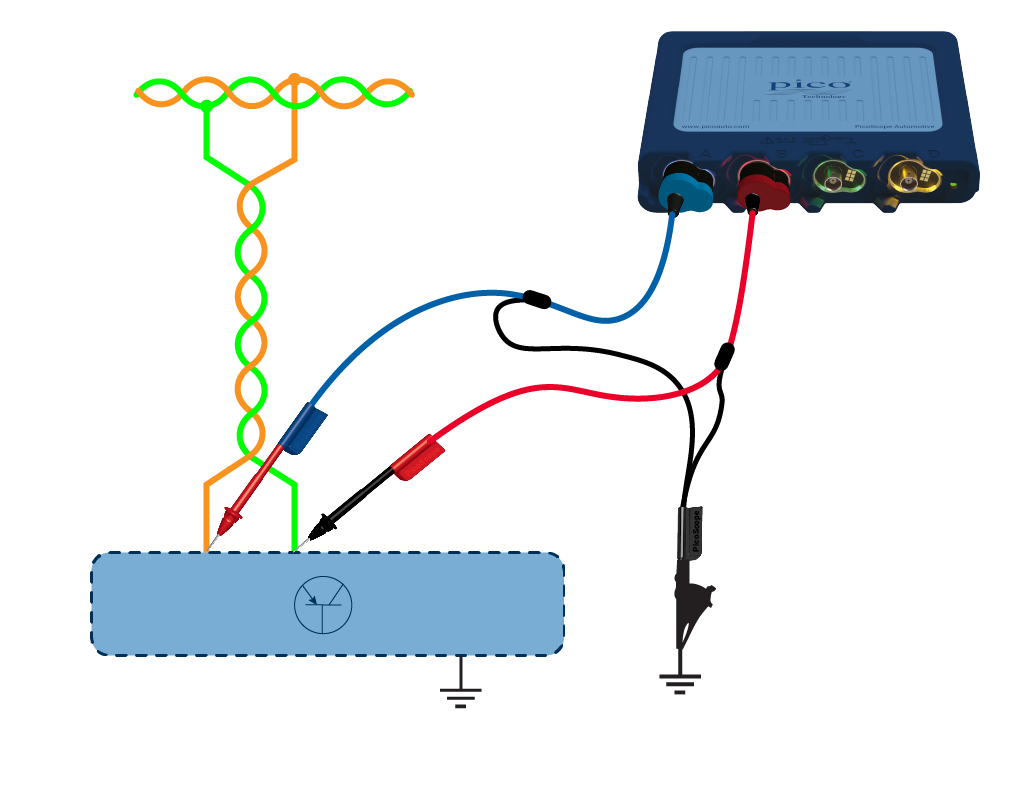
- 连接一条BNC测试线到 示波器 A通道,连接一个后背刺针到测试线彩色接头(正极)上。再用刺针背刺车辆DLC的针脚 6 ,黑色接头连接到车辆的蓄电池负极或底盘良好的接地上搭铁。
- 连接一条BNC测试线到 示波器 B通道,连接一个后背刺针到测试线彩色接头(正极)上。再用刺针背刺车辆DLC的针脚 14 ,黑色接头连接到车辆的蓄电池负极或底盘良好的接地上搭铁。
- 最小化此帮助页面,您会看到 PicoScope软件界面 加载了一个示例波形,而且预设好了软件以便您采集波形。
- PicoScope软件 还设置好了串行解码功能,当您开始捕获波形时,会显示您所测试波形的译码数据。
- 点击“开始” ,开始观察实时数据。
- 打开点火开关。
- 采集到波形后,“停止” 示波器运行。
- 关闭点火开关。
- 使用 波形缓冲区、 放大 以及 测量 等工具来观察和分析波形。
示例波形
波形注意点
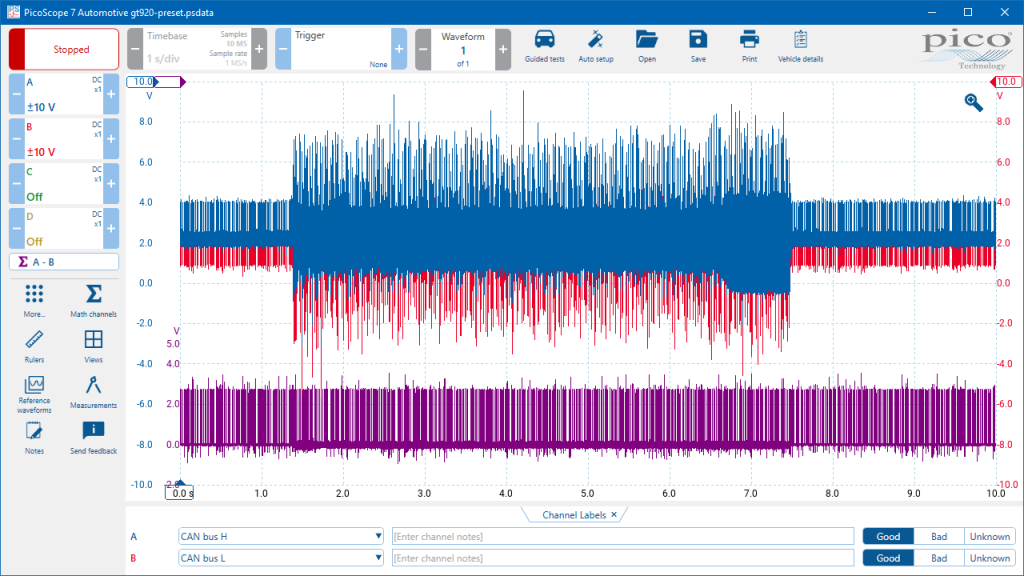
这个波形有以下特征:
- 通常情况下,CAN-L 和 CAN-H 两个信号互为镜像。
- 没有电磁干扰时,CAN-L 波形在 2.5 V 和 1.5 V切换变化,CAN-H 波形在 2.5 V 和 3.5 V切换变化。
- 数学通道 A – B 是 CAN-H 和 CAN-L 的差分电压值,表明总线的逻辑状态。
- 电磁干扰(EMI)会对 CAN-H 和 CAN-L 线路造成较大干扰。但是数学通道显示两者之间的差分信号以及网络通信将保持不变。
- 在 CAN-H 或 CAN-L 受到显著 EMI 影响时,CAN-H 和 CAN-L 串行解码将失败,但是却可以成功地对 A – B 数学通道进行译码。
波形库
在 波形库 添加通道的下拉菜单中选择 CAN bus H 或 CAN bus L。
更多信息
CAN bus是一个串行通讯系统,被用于很多车辆上连接各个系统和传感器,代替传统的多线线缆束。
CAN是Controller Area Network(控制器局域网络)的缩写。它在轿车和商用车上越来越普遍。它的优势包括:明显地减少重量、可靠、易于制造,并为车载诊断提供选项。它的劣势包括:增加了成本,且服务维修车辆时需要一些专业知识。
CAN 总线提供控制单元之间的串行通信。例如,动力系统 CAN 总线允许 ABS 控制单元同时向发动机控制模块 (ECM)、变速箱控制模块 (TCM)、仪表盘 (IC) 和辅助约束系统 (SRS) 传送含有车轮速度数据的消息。
在CAN总线上,利用CAN_H和CAN_L两根线上的电位差来表示CAN信号。CAN总线上的电位差分为显性电平和隐性电平。其中显性电平为逻辑0,隐性电平为逻辑1。
CAN总线的心脏是CAN控制器。它通过CAN-H和CAN-L线缆连接到CAN网络上的所有部件(节点)上。信号是差分的:每条CAN线参考另一条CAN线,而不是参考车辆接地。在电子噪音干扰环境中如车辆,CAN总线具有很好的噪音抑制。
CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。CAN发射器接收逻辑电平之后,再将其转换为差分电平输出到CAN总线上。
CAN接收器将CAN_H 和 CAN_L 线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。
CAN总线的报文帧共分为数据帧、远程帧、错误帧、过载帧和帧间隔5种类型。
数据帧是使用最多的帧,它由7个不同的位场组成:帧起始、仲裁场、控制场、CRC场、应答场、帧结尾。其中根据仲裁段ID码长度的不同,分为标准帧和扩展帧。
每个网络节点具有唯一的标识符。因为总线上的ECU是并联的,所有节点一直看得到所有的数据。节点只有检测到它自己的标识符时才作出回应。例如,当ABS ECU发送指令来激活ABS单元,ABS单元相应地作出回应,但网络的其余部分忽视这个指令。每个节点都可以从网络上被断开,但不会影响其它的节点。
因为很多不同的汽车部件可能共享同样的总线硬件,将可用的CAN总线带宽优先分配给最安全关键的系统是很重要的。节点通常会被分配不同的优先级。例如,发动机控制、刹车和气囊在安全角度上来看是最重要的,用于激活这些系统的命令优先级被赋予最高(1),它们会在较为没那么关键的系统之前工作。音频和导航设备通常是中级(2)优先级,而简单的灯光激活被赋予最低优先级(3)。一个被称为仲裁的过程决定所有信息的优先级。实际上,对用户来讲,所有动作都是即刻的。
大多数汽车CAN网络的工作速度是250 kB/s 或 500 kB/s,尽管系统的工作速度可达 1 MHz。最新的汽车上使用多达3个独立的CAN网络,通常它们的速度都不一样,它们被网关连接在一起。例如,发动机管理功能可能用速度为500 kB/s的高速总线,底盘系统用速度为250 kB/s 的CAN总线。管家功能如灯光、ICE、卫星导航和镜子用单独的低速的、单线的LIN总线。三个网络中的任一个网络上的数据,其它两个网络通过网关都可以看到,例如:变速器可从发动机管理系统获得数据,反之亦然。
在同一条CAN线上,所有节点的通信速度(位速率)必须相同,如果两条不同通信速度总线上的节点想要实现信息交互,必须通过网关。例如:汽车上一般有两条CAN总线:500kbps的驱动系统CAN总线和125kbps的舒适系统CAN总线,如果驱动系统CAN总线上的发动机节点要把自己的转速信息发送给舒适系统CAN总线上的转速表节点,那么这两条总线必须通过网关相连。
CAN bus 在现代汽车上逐渐普遍,并会更加普遍,因为技术成熟和成本下降。
通过检测CAN信号的原因是:OBD指示哪里有一个CAN故障,或者怀疑一个CAN节点(ECU)有故障检测它的CAN连接。应该查阅汽车制造厂手册,获知精确的波形参数。
记住:网络上很多数据都是极其关乎安全的,所以不要使用刺针刺破CAN线缆的绝缘层!
关于CAN总线串行译码的其他内容:
免责声明
此帮助主题如有更改,不另行通知。所包含的信息经过仔细检查并认为是正确的。此信息是我们研究和检测的一个例子,并不是固定的程序。对于不正确之处,Pico Technology不负任何责任。每个车辆都会不一样,且要求唯一的测试设置。