SENT (Single Edge Nibble Transmission) 是由SAE推出的一种汽车传感器与ECU通信的新标准(SAE J2716),协议简单且具有很多优势,SENT接口是Analog input 的替代品。SENT不能替代CAN或是LIN,因为SENT是连续单向传输的, CAN和LIN都需是双向传输。
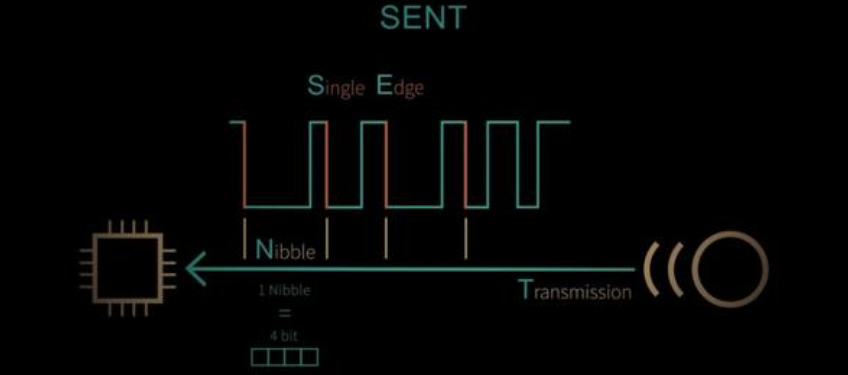
图2.2 SENT 传输示意图
SENT (Single Edge Nibble Transmission) 是由SAE推出的一种汽车传感器与ECU通信的新标准(SAE J2716),协议简单且具有很多优势,SENT接口是Analog input 的替代品。SENT不能替代CAN或是LIN,因为SENT是连续单向传输的, CAN和LIN都需是双向传输。
图2.2 SENT 传输示意图
在LIN数据总线系统内,LIN从属控制单元的通信受到LIN主控制单元的完全控制,只有在LIN主控制单元发出命令的情况下,LIN从属控制单元才能通过LIN总线进行数据传输。单个的控制单元、传感器、执元件都相当于LIN从属控制单元,传感器是信号输入装置,传感器内集成有一个电控装置,它对测量值进行分析,分析后的数值是作为数字信号通过LIN总线进行传输的。有的传感器或者是执行元件只是用LIN主控制单元插口上的一个针脚,就可以实现信息传输,也就是单线传输。
LIN执行元件都是智能型的电子或机电部件,它们通过LIN主控制单元的LIN数字信号接收任务。LIN主控制单元通过集成的传感器来获取执行元件的实际的工作状态,然后就把规定状态和实际状态进行对比,并发出相应的控制指令。LIN主控制单元发出控制指令后之后,传感器和执行元件才能够做出反应。LIN从属控制单元等待主控制单元的指令,根据需要与主控制单元进行通信。如果要结束休眠模式,LIN从属控制单元可自行发送唤醒信号。LIN总控制单元安装在LIN总线系统设备上。
LIN主控制单元控制总线导线上的每条信息的开始处都通过LIN总线主控单元发送一个信息标题,它由一个同步相位构成,后面部分是标识符字节,可以传输2、4、8个字节的数据。标识符用于确定主控单元是否会将数据传输给从属控制单元。信息段包含发送到从属控制单元的信息。校验区可为数据传输提供良好的安全性。校验区由主控制单元通过数据字节构成,位于信息结束部分。LIN总线主控制单元以循环形式传输当前信息。
LIN主控制单元连接在CAN数据总线上,监控数据传输过程和数据传输速率,发送信息标题,决定何时将哪些信息发送到LIN数据总线上多少次,在LIN数据总线系统的LIN控制单元与CAN总线直接起“翻译”作用,能够进行LIN主控制单元及与之相连的LIN从属控制单元的自诊断。
LIN总线所控制的控制单元一般都分布在距离较近的空间,传输数据是单线,数据线最长可以达到40m。在主节点内配置1kΩ电阻端接12V供电,从节点内配置30kΩ电阻端接12V供电。各节点通过电池正极端接电阻向总线供电,每个节点都可以通过内部发送器拉低总线电压。
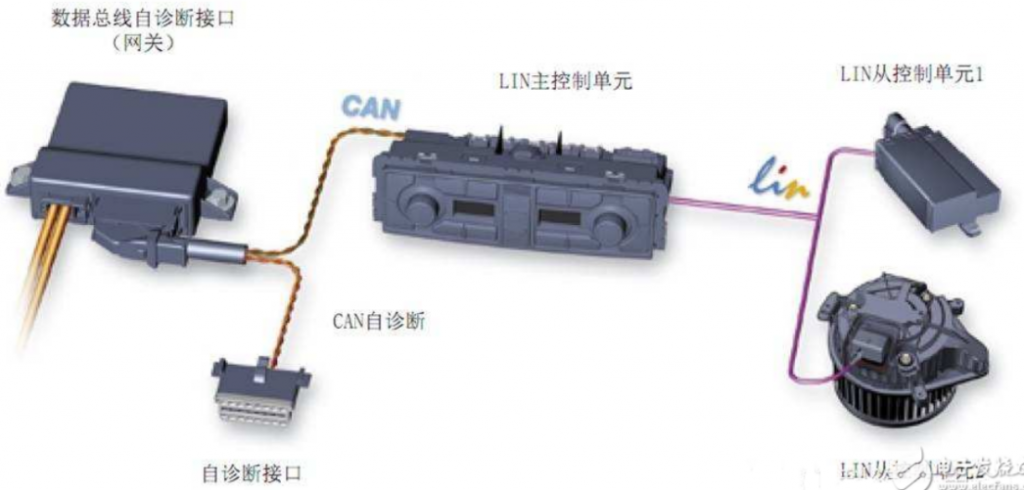
图2.1 LIN总线控制系统
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
(3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
(4)可根据报文的ID决定接收或屏蔽该报文;
(5)可靠的错误处理和检错机制;
(6)发送的信息遭到破坏后,可自动重发;
(7)节点在错误严重的情况下具有自动退出总线的功能;
(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
(1)以广播的形式发送报文.当CAN总线上的某个节点需要给其他节点发送消息时,会以广播的形式发送给总线上所有的节点,因为总线上的节点不适用地址来进行配置CAN系统,而是根据报文的开头的11位标识符决定是否要接受其他节点发来的报文;
(2)每个节点都有自己的处理器和CAN总线接口控制器;
(3)当一个节点需要发送数据到另一个节点时,自身节点的处理器需要将要发送的数据和自己的标识符传给自身的总线控制接口,处于准备状态;当获取到总线的使用权后,将数据和标识符组装成报文,将报文以一定格式发出,此时其他的节点处于接收状态.至于其他节点是否接收,由其他节点决定,是都会对某些报文进行过滤;
(4)当新增的节点仅仅是纯粹的数据接收设备时,只需要该设备直接从总线上接收数据即可。
(1)是一种串行通信协议,能有效的支持具有很高安全等级的分布实时控制;
(2)应用范围十分广泛,从高速网络到低价位的多路接线都可以使用CAN;
(3)主要运用于汽车电子航天等行业,使用CAN连接发动机的控制单元等汽车部件;
(4)具有可靠,实时以及灵活的特性。