搜索
产品
示波器套装
其它工具
为何选Pico示波器
Category Archives: 资料库
2.5.3 TCS(牵引力控制系统)
2.5.2 AWS(意外事故预防和缓和的驾驶辅助系统)
AWS是Advance Warning System缩写。是一个意外事故预防和缓和的驾驶辅助系统,在危险发生前给驾驶员提供及时的声音和视觉报警。公路交通事故已成为全球范围内日益严重的公共安全问题。统计资料表明,其中驾驶员的人为因素导致的公路交通事故率最高。无论是事故数量。还是伤亡人数均分别高达各自总数的90%左右。并且。在导致这些公路交通事故的驾驶员的人为因素中,疲劳和精神分散驾驶是重要原因之一。驾驶员在3s时间内的注意力不集中,造成了其中80%的交通事故,主要表现为车道偏离和追尾事故。 国内外在防止车道偏离和保持安全车距两个方面都开展了相当多有益的探索,在雷达、激光、超声波、红外线、机器视觉等传感器技术方面都取得了一些突破。经过长期大量的研究实践,人们逐步认识到采用单目视觉技术,仅使用一台摄像机,即能在一定程度上实现对前方道路环境、车辆探测及车距监测的功能。 研究显示,若在公路交通事故发生前的1.5s给驾驶员发出预警,则可避免90%的这类事故。因此,通过在汽车上安装汽车碰撞预警系统,利用技术手段分析车道、周围车辆的状况等驾驶环境信息,一旦当驾驶员发生疲劳及精神分散、汽车出现无意识的车道偏离及汽车间车距过近。存在追尾可能时。能够及时给予驾驶主动预警,是减少公路交通事故行之有效的技术措施。
2.5.1 ABS(防抱死系统)
(1)工作原理
在制动时,ABS根据每个车轮速度传感器传来的速度信号,可迅速判断出车轮的抱死状态,关闭开始抱死车轮上面的常开输入电磁阀,让制动力不变,如果车轮继续抱死,则打开常闭输出电磁阀。
这个车轮上的制动压力由于出现直通制动液贮油箱的管路而迅速下移,防止了因制动力过大而将车轮完全抱死。在让制动状态始终处于最佳点(滑移率S为20%),制动效果达到最好,行车最安全。
在制动总泵前面腔内的制动液是动态压力制动液,它推动反应套筒向右移动,反应套筒又推动助力活塞从而使制动踏板推杆向右移。因此,在ABS工作地时候,驾驶员可以感觉到脚上踏板地颤动,听到一些噪音。
汽车减速后,一旦ABS电脑检测到车轮抱死状态消失,它就会让主控制阀关闭,从而使系统转入普通的制动状态下进行工作。
如果蓄压器的压力下降到安全极限以下,红色制动故障指示灯和琥珀色ABS故障指示灯亮。在这种情况下,驾驶员要用较大的力进行深踩踏板式的制动方式才能对前后轮进行有效的制动。
(2)作用
其实ABS最重要的功能并不是为了缩短制动距离,而是为了能够尽量保持制动时汽车的方向稳定性。制动防抱死系统起作用时,车轮与路面的摩擦属滚动摩擦,这会充分利用车轮与路面之间的最大附着力进行制动,从而提高制动减速度,缩短制动距离,但最重要的还是保证汽车的方向稳定性。
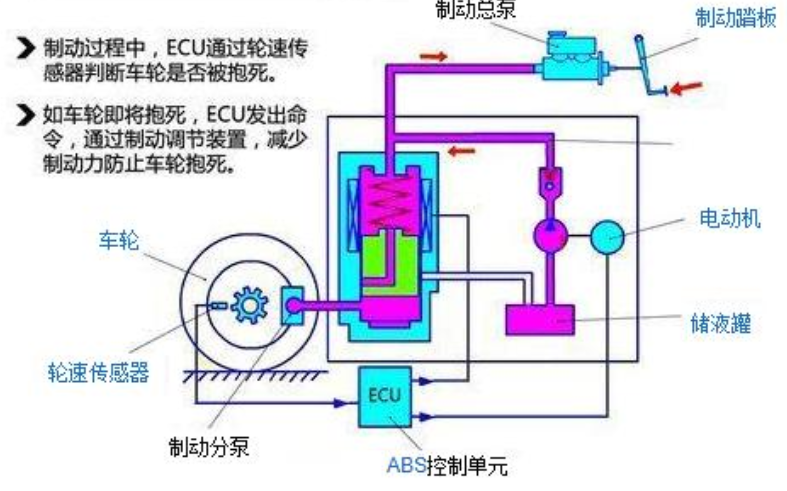
图2.5 ABS控制系统
2.4.4 FlexRay的节点有几个基本的运行状态
- 配置状态(默认配置/配置)-用于各种初始化设置,包括通信周期和数据速率。
- 就绪状态-用于进行内部的通信设置。
- 唤醒状态-用于唤醒没有在通信的节点。在该状态下,节点向另一节点发送唤醒信号,唤醒并激活总线驱动器、通信控制器、和总线监控器。
- 启动状态-用于启动时钟同步,并为通信做准备。
- 正常状态(主动/被动)-可以进行通信的状态。
- 中断状态-表明通信中断。
2.4.3 FlexRay 的应用
FlexRay 面向的是众多的车内线控操作(X-by-Wire)。FlexRay 导线控制应用的例子包括:
- 线控操作转向-典型的是使用电子控制单元
- 防抱死制动系统(ABS)-包括车辆稳定控制(VSC)和车辆稳定助手(VSA)
2.4.2 FlexRay 节点运算
每个FlexRay节点都包括一个控制器和一个驱动器部件。控制器部件包括一个主机处理器和一个通信控制器。驱动器部件通常包括总线驱动器和总线监控器(可选择)。总线驱动器将通信控制器与总线相连接,总线监控器监视接入总线的连接。主机通知总线监控器通信控制器分配了那些时槽。接下来,总线监控器只允许通信控制器在这些时槽中传输数据,并激活总线驱动器。若总线监控器发现时间时序有间隔,则断开通信信道的连接。
2.4.1 简介
FlexRay车载网络标准已经成为同类产品的基准,将在未来很多年内,引导整个汽车电子产品控制结构的发展方向。FlexRay是继CAN 和LIN之后的最新研发成果,可以有效管理多重安全和舒适功能。
FlexRay是戴姆勒克莱斯勒公司的注册商标。FlexRay联盟 (FlexRay Consortium)推进了FlexRay的标准化,使之成为了新一代汽车内部网络通讯协议。FlexRay关注的是当今汽车行业的一些核心需求,包括更快的数据速率,更灵活的数据通信,更全面的拓扑选择和容错运算。
因此,FlexRay可以为下一代的车内控制系统提供所需的速度和可靠性。CAN网络最高性能极限为1Mbps。LIN和K-LINE分枝网络最高性能极限为20Kbit/s。而FlexRay两个信道上的数据速率最大可达到10Mbps,总数据速率可达到20Mbit/秒,因此,应用在车载网络,FlexRay 的网络带宽可能是CAN的20倍之多。
FlexRay还能够提供很多CAN网络所不具有的可靠性特点。尤其是FlexRay具备的冗余通信能力可实现通过硬件完全复制网络配置,并进行进度监测。FlexRay同时提供灵活的配置,可支持各种拓扑,如总线、星型和混合拓扑。设计人员可以通过结合两种或两种以上的该类型拓扑来配置分布式系统。
另外,FlexRay可以进行同步(实时)和异步的数据传输,来满足车辆中各种系统的需求。譬如说,分布式控制系统通常要求同步数据传输。
为了满足不同的通信需求,FlexRay在每个通信周期内都提供静态和动态通信段。静态通信段可以提供有界延迟,而动态通信段则有助于满足在系统运行时间内出现的不同带宽需求。FlexRay 帧的固定长度静态段用固定时间触发(fixed-time-trigger)的方法来传输信息,而动态段则使用灵活时间触发的方法来传输信息。
FlexRay不仅可以像CAN和LIN网络这样的单信道系统一般运行,而且还可以作为一个双信道系统运行。双信道系统可以通过冗余网络传输数据——这也是高可靠系统的一项重要性能。
2.3.3 SENT总线的协议
SENT总线协议的数据使用半个字节Nibble,即4bit来进行编码定义的,一个半字节Nibble是通过2个下降沿之间的时间差来定义的。如下是一个Nibble的电压逻辑信号:
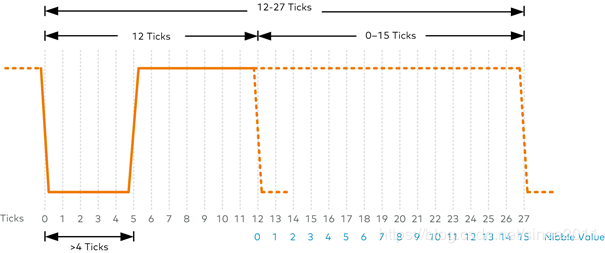
图2.4 SENT总线协议
时间精度以1个节拍Tick来定义(一般1个Tick的时间是3~10us),每一个Nibble从一个下降沿开始,并且之后再逻辑0状态至少维持4Ticks,之后下一个下降沿距离第一个下降沿的时间差作为Nibble值的编码依据。需要注意的是,后一个下降沿距离第一个下降沿至少相隔12Ticks,至多27Ticks,且相隔Tick数减去12即为最终的Nibble值,如此Nibble值最小为0,最大为15(27Tick-12Tick),二进制表示时即为4bit。
2.3.2 SENT总线的硬件连接
SENT总线常用于传感器信号,其基本引脚连接如下:
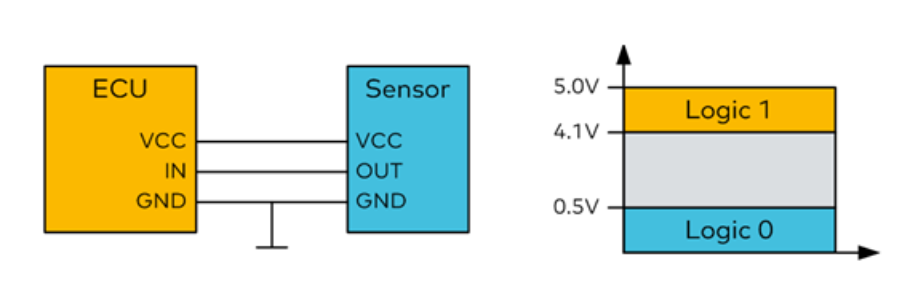
图2.3 SENT总线的硬件连接和逻辑电平
其高低信号的电平要求:0~0.5V为逻辑电平0,4.1~5V为逻辑电平1。