LIN总线所控制的控制单元一般都分布在距离较近的空间,传输数据是单线,数据线最长可以达到40m。在主节点内配置1kΩ电阻端接12V供电,从节点内配置30kΩ电阻端接12V供电。各节点通过电池正极端接电阻向总线供电,每个节点都可以通过内部发送器拉低总线电压。
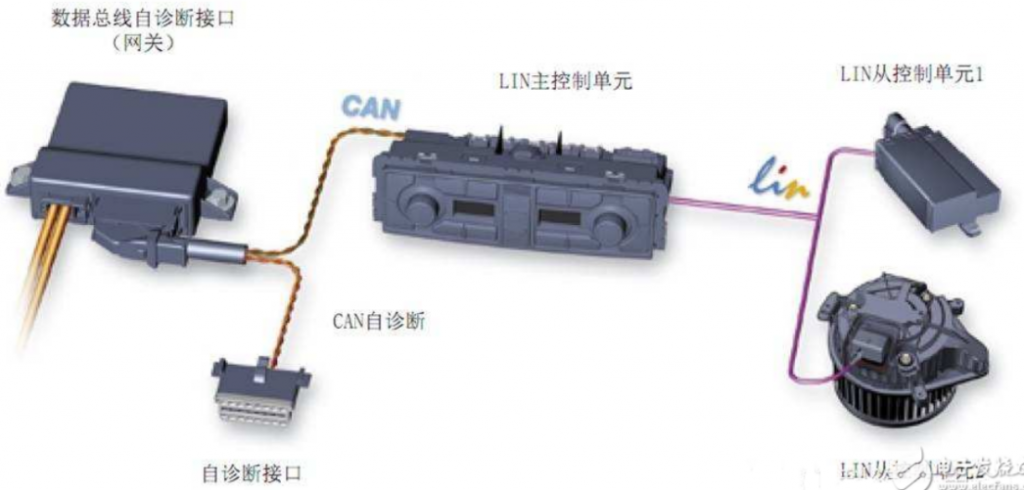
图2.1 LIN总线控制系统
LIN总线所控制的控制单元一般都分布在距离较近的空间,传输数据是单线,数据线最长可以达到40m。在主节点内配置1kΩ电阻端接12V供电,从节点内配置30kΩ电阻端接12V供电。各节点通过电池正极端接电阻向总线供电,每个节点都可以通过内部发送器拉低总线电压。
图2.1 LIN总线控制系统
LIN总线是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络,是对控制器区域网络(CAN)等其它汽车多路网络的一种补充,适用于对网络的带宽、性能或容错功能没有过高要求的应用。LIN总线是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式,是UART中的一种特殊情况。
(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
(3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
(4)可根据报文的ID决定接收或屏蔽该报文;
(5)可靠的错误处理和检错机制;
(6)发送的信息遭到破坏后,可自动重发;
(7)节点在错误严重的情况下具有自动退出总线的功能;
(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
(1)以广播的形式发送报文.当CAN总线上的某个节点需要给其他节点发送消息时,会以广播的形式发送给总线上所有的节点,因为总线上的节点不适用地址来进行配置CAN系统,而是根据报文的开头的11位标识符决定是否要接受其他节点发来的报文;
(2)每个节点都有自己的处理器和CAN总线接口控制器;
(3)当一个节点需要发送数据到另一个节点时,自身节点的处理器需要将要发送的数据和自己的标识符传给自身的总线控制接口,处于准备状态;当获取到总线的使用权后,将数据和标识符组装成报文,将报文以一定格式发出,此时其他的节点处于接收状态.至于其他节点是否接收,由其他节点决定,是都会对某些报文进行过滤;
(4)当新增的节点仅仅是纯粹的数据接收设备时,只需要该设备直接从总线上接收数据即可。
(1)是一种串行通信协议,能有效的支持具有很高安全等级的分布实时控制;
(2)应用范围十分广泛,从高速网络到低价位的多路接线都可以使用CAN;
(3)主要运用于汽车电子航天等行业,使用CAN连接发动机的控制单元等汽车部件;
(4)具有可靠,实时以及灵活的特性。
可变正时气门VVT(Variable Valve Timing)可变气门正时系统。该系统通过配备的控制及执行系统,对发动机凸轮的相位进行调节,从而使得气门开启、关闭的时间随发动机转速的变化而变化,以提高充气效率,增加发动机功率。
该系统由ECU协调控制,发动机各部位的传感器实时向ECU报告运转情况。由于在ECU中储存有气门最佳正时参数,所以ECU会随时对正时机构进行调整,从而改变气门的开启和关闭时间,或提前、或滞后、或保持不变,下面这段视频则清楚的展示了VVT机构的工作原理。简单的说,VVT系统就是通过在凸轮轴的传动端加装一套液力机构,从而实现凸轮轴在一定范围内的角度调节,也就相当于对气门的开启和关闭时刻进行了调整。
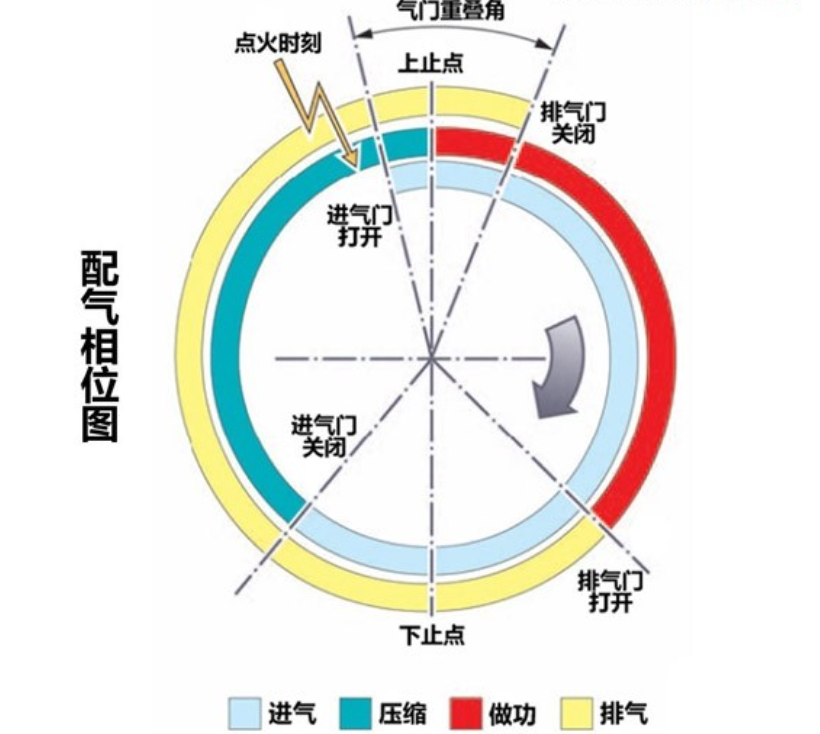
图1.42 配气相位图
电子节气门控制系统,可以使节气门开度得到精确控制。
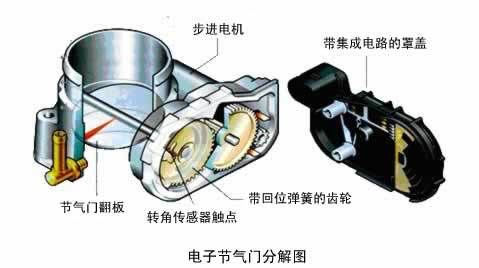
图1.40 电子节气门分解图
在工作时,驾驶员操纵油门踏板,油门踏板位置传感器产生相应的电压信号输入节气门ECU,控制单元首先对输入的信号进行滤波,以消除环境噪声的影响,然后根据当前的工作模式、踏板移动量和变化率解析驾驶员意图,计算出对发动机转矩的基本需求,得到相应节气门转角的基本期望值。经过CAN总线和整车控制单元进行通信,获取其他工况信息以及各种传感器信号,如发动机转速、挡位、节气门位置、空调能耗等,由此计算出整车所需要的全部转矩,通过对节气门转角期望值进行补偿,得到节气门的最佳开度,并把相应的电压信号发送到驱动电路模块,驱动电动机使节气门达到最佳的开度位置,节气门位置传感器则把节气门的开度信号反馈给节气门控制单元,形成闭环的位置控制。
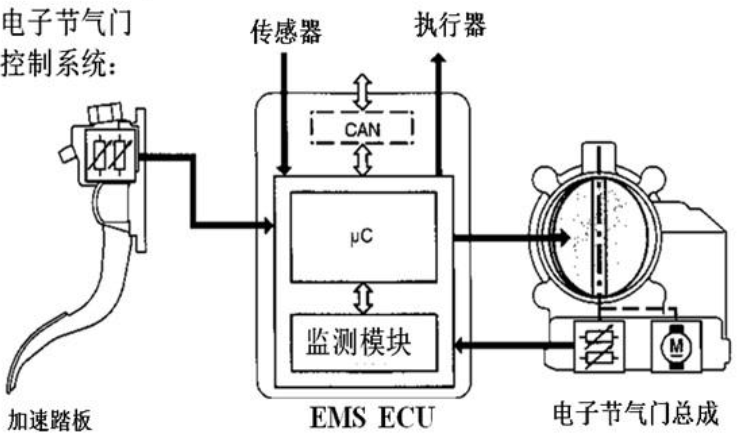
图1.41 电子节气门工作原理图
流量控制阀是在一定压力差下,依靠改变节流口液阻的大小来控制节流口的流量,从而调节执行元件(液压缸或液压马达)运动速度的阀类。控制高压泵流量达到控制高压压力的目标,提高油泵效率。
数显流量控制阀主要由自动阀芯、手动阀芯和显示器三大部分组成。其中,自动阀芯主要用于维持流量恒定,即在管网压力变化时,自动阀芯就会在压力的作用下自动开大或关小阀口来维持设定流量数值不变;手动阀芯主要用于调节流量,即根据显示值来设定所需的流量值;显示部分主要用于处理并显示最终计算结果,其又可分为流量阀机芯、传感器发讯器和电子计算器显示器部分。
流量控制阀的工作过程大致是酱紫的,被测水流流经阀门,水流冲击流量机芯内的叶轮,叶轮旋转与传感发讯器感应,使传感器发出与流量成正比的电讯号,流量电讯号通过导线送入电子计算器,经过计算器计算、微处理器处理后,其流量值显示出来。