- 配置状态(默认配置/配置)-用于各种初始化设置,包括通信周期和数据速率。
- 就绪状态-用于进行内部的通信设置。
- 唤醒状态-用于唤醒没有在通信的节点。在该状态下,节点向另一节点发送唤醒信号,唤醒并激活总线驱动器、通信控制器、和总线监控器。
- 启动状态-用于启动时钟同步,并为通信做准备。
- 正常状态(主动/被动)-可以进行通信的状态。
- 中断状态-表明通信中断。
搜索
产品
示波器套装
其它工具
为何选Pico示波器
FlexRay 面向的是众多的车内线控操作(X-by-Wire)。FlexRay 导线控制应用的例子包括:
每个FlexRay节点都包括一个控制器和一个驱动器部件。控制器部件包括一个主机处理器和一个通信控制器。驱动器部件通常包括总线驱动器和总线监控器(可选择)。总线驱动器将通信控制器与总线相连接,总线监控器监视接入总线的连接。主机通知总线监控器通信控制器分配了那些时槽。接下来,总线监控器只允许通信控制器在这些时槽中传输数据,并激活总线驱动器。若总线监控器发现时间时序有间隔,则断开通信信道的连接。
FlexRay车载网络标准已经成为同类产品的基准,将在未来很多年内,引导整个汽车电子产品控制结构的发展方向。FlexRay是继CAN 和LIN之后的最新研发成果,可以有效管理多重安全和舒适功能。
FlexRay是戴姆勒克莱斯勒公司的注册商标。FlexRay联盟 (FlexRay Consortium)推进了FlexRay的标准化,使之成为了新一代汽车内部网络通讯协议。FlexRay关注的是当今汽车行业的一些核心需求,包括更快的数据速率,更灵活的数据通信,更全面的拓扑选择和容错运算。
因此,FlexRay可以为下一代的车内控制系统提供所需的速度和可靠性。CAN网络最高性能极限为1Mbps。LIN和K-LINE分枝网络最高性能极限为20Kbit/s。而FlexRay两个信道上的数据速率最大可达到10Mbps,总数据速率可达到20Mbit/秒,因此,应用在车载网络,FlexRay 的网络带宽可能是CAN的20倍之多。
FlexRay还能够提供很多CAN网络所不具有的可靠性特点。尤其是FlexRay具备的冗余通信能力可实现通过硬件完全复制网络配置,并进行进度监测。FlexRay同时提供灵活的配置,可支持各种拓扑,如总线、星型和混合拓扑。设计人员可以通过结合两种或两种以上的该类型拓扑来配置分布式系统。
另外,FlexRay可以进行同步(实时)和异步的数据传输,来满足车辆中各种系统的需求。譬如说,分布式控制系统通常要求同步数据传输。
为了满足不同的通信需求,FlexRay在每个通信周期内都提供静态和动态通信段。静态通信段可以提供有界延迟,而动态通信段则有助于满足在系统运行时间内出现的不同带宽需求。FlexRay 帧的固定长度静态段用固定时间触发(fixed-time-trigger)的方法来传输信息,而动态段则使用灵活时间触发的方法来传输信息。
FlexRay不仅可以像CAN和LIN网络这样的单信道系统一般运行,而且还可以作为一个双信道系统运行。双信道系统可以通过冗余网络传输数据——这也是高可靠系统的一项重要性能。
SENT总线协议的数据使用半个字节Nibble,即4bit来进行编码定义的,一个半字节Nibble是通过2个下降沿之间的时间差来定义的。如下是一个Nibble的电压逻辑信号:
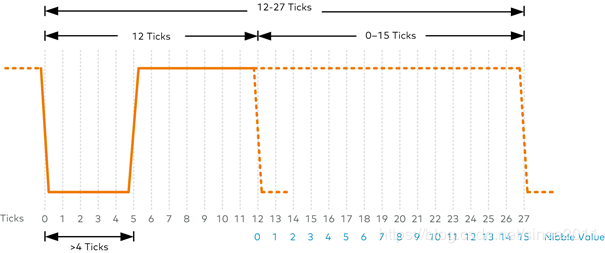
图2.4 SENT总线协议
时间精度以1个节拍Tick来定义(一般1个Tick的时间是3~10us),每一个Nibble从一个下降沿开始,并且之后再逻辑0状态至少维持4Ticks,之后下一个下降沿距离第一个下降沿的时间差作为Nibble值的编码依据。需要注意的是,后一个下降沿距离第一个下降沿至少相隔12Ticks,至多27Ticks,且相隔Tick数减去12即为最终的Nibble值,如此Nibble值最小为0,最大为15(27Tick-12Tick),二进制表示时即为4bit。
SENT总线常用于传感器信号,其基本引脚连接如下:
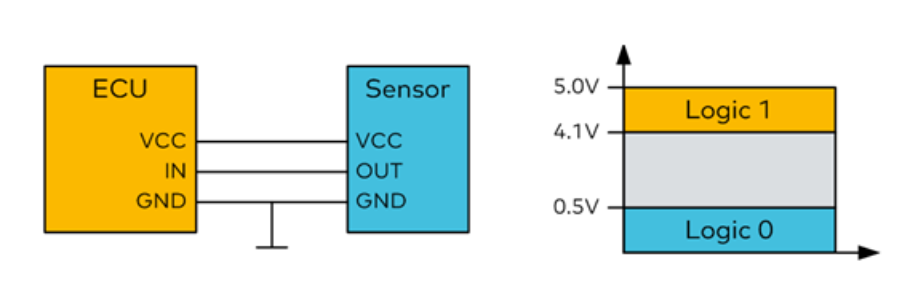
图2.3 SENT总线的硬件连接和逻辑电平
其高低信号的电平要求:0~0.5V为逻辑电平0,4.1~5V为逻辑电平1。
SENT (Single Edge Nibble Transmission) 是由SAE推出的一种汽车传感器与ECU通信的新标准(SAE J2716),协议简单且具有很多优势,SENT接口是Analog input 的替代品。SENT不能替代CAN或是LIN,因为SENT是连续单向传输的, CAN和LIN都需是双向传输。
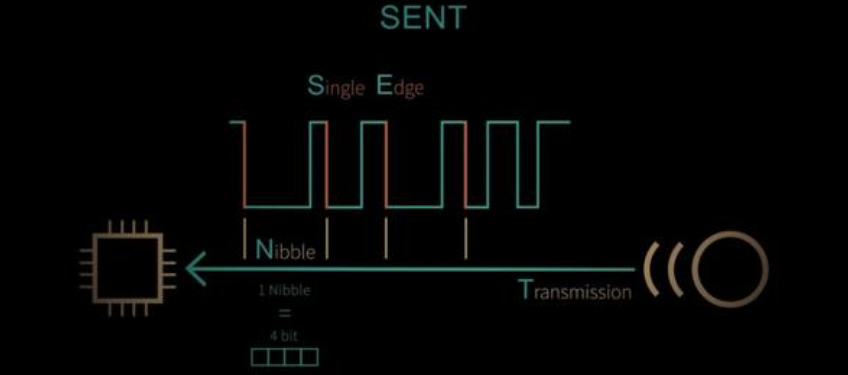
图2.2 SENT 传输示意图
在LIN数据总线系统内,LIN从属控制单元的通信受到LIN主控制单元的完全控制,只有在LIN主控制单元发出命令的情况下,LIN从属控制单元才能通过LIN总线进行数据传输。单个的控制单元、传感器、执元件都相当于LIN从属控制单元,传感器是信号输入装置,传感器内集成有一个电控装置,它对测量值进行分析,分析后的数值是作为数字信号通过LIN总线进行传输的。有的传感器或者是执行元件只是用LIN主控制单元插口上的一个针脚,就可以实现信息传输,也就是单线传输。
LIN执行元件都是智能型的电子或机电部件,它们通过LIN主控制单元的LIN数字信号接收任务。LIN主控制单元通过集成的传感器来获取执行元件的实际的工作状态,然后就把规定状态和实际状态进行对比,并发出相应的控制指令。LIN主控制单元发出控制指令后之后,传感器和执行元件才能够做出反应。LIN从属控制单元等待主控制单元的指令,根据需要与主控制单元进行通信。如果要结束休眠模式,LIN从属控制单元可自行发送唤醒信号。LIN总控制单元安装在LIN总线系统设备上。
LIN主控制单元控制总线导线上的每条信息的开始处都通过LIN总线主控单元发送一个信息标题,它由一个同步相位构成,后面部分是标识符字节,可以传输2、4、8个字节的数据。标识符用于确定主控单元是否会将数据传输给从属控制单元。信息段包含发送到从属控制单元的信息。校验区可为数据传输提供良好的安全性。校验区由主控制单元通过数据字节构成,位于信息结束部分。LIN总线主控制单元以循环形式传输当前信息。
LIN主控制单元连接在CAN数据总线上,监控数据传输过程和数据传输速率,发送信息标题,决定何时将哪些信息发送到LIN数据总线上多少次,在LIN数据总线系统的LIN控制单元与CAN总线直接起“翻译”作用,能够进行LIN主控制单元及与之相连的LIN从属控制单元的自诊断。