故障现象
有车主反映,他的车加速无力,疑似发动机点火有故障,接上解码器读取车辆故障码,车辆报故障【P001600:气缸列1,凸轮轴/曲轴位置传感器错误的配置】

故障诊断
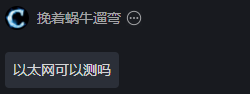
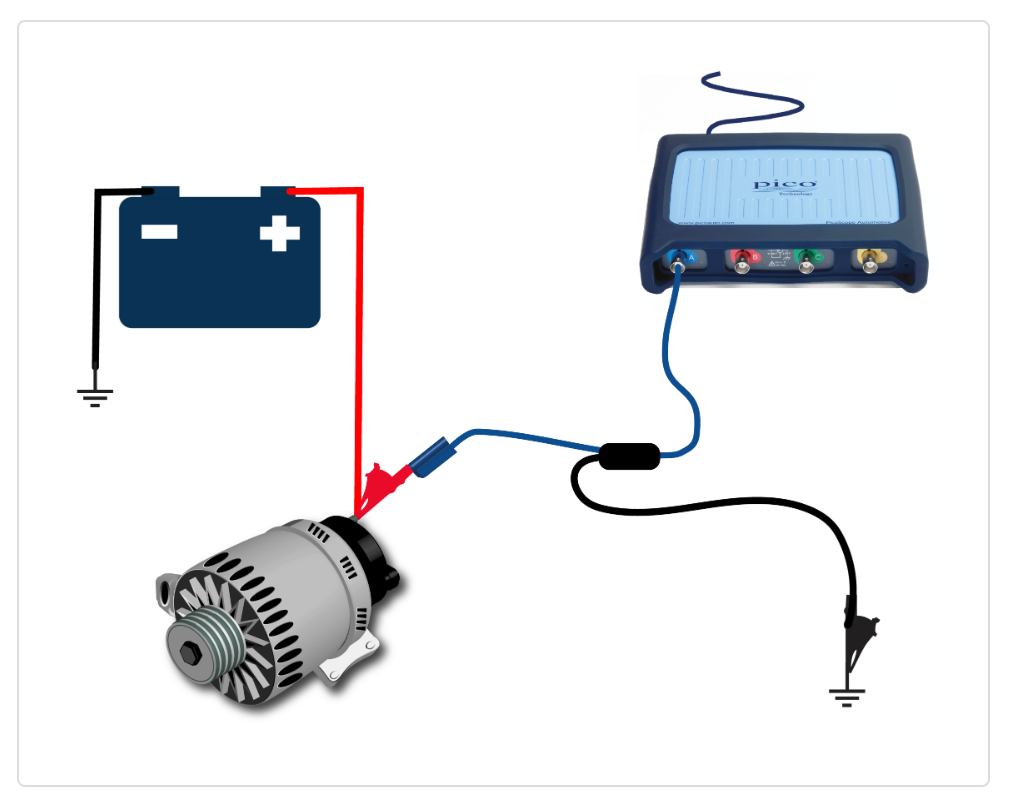
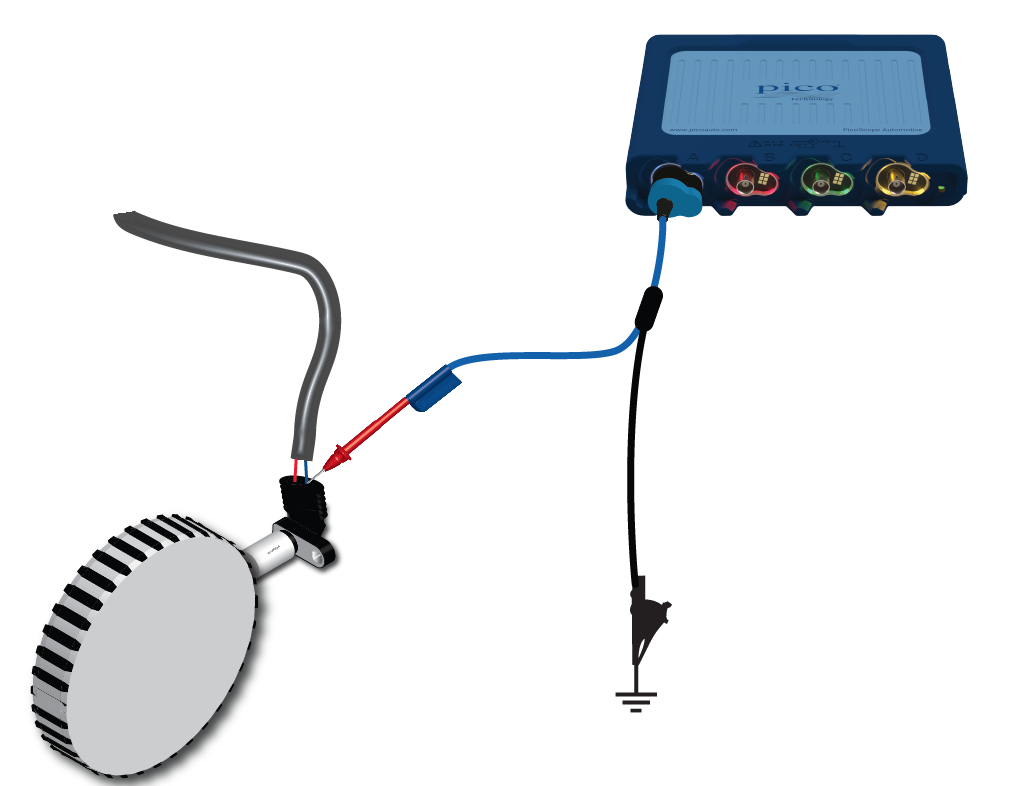
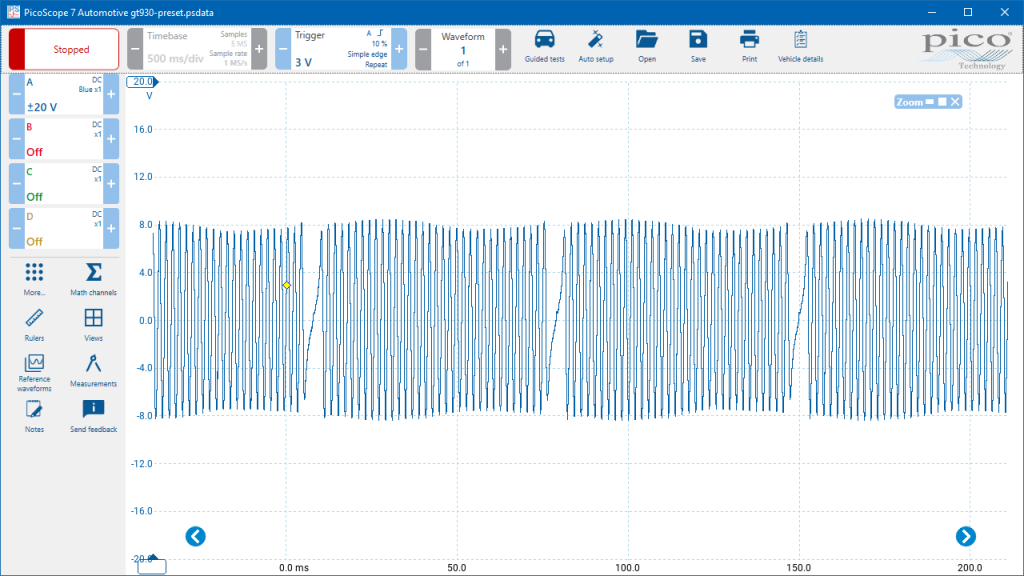
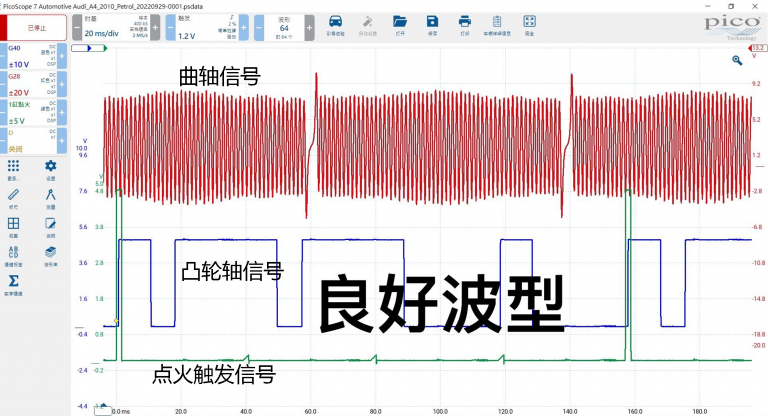
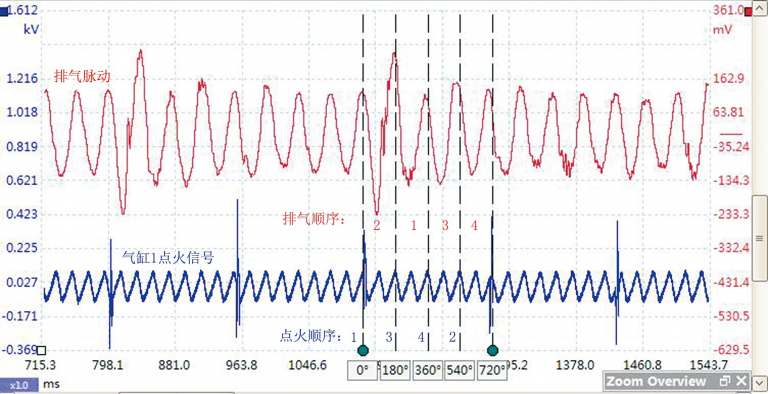
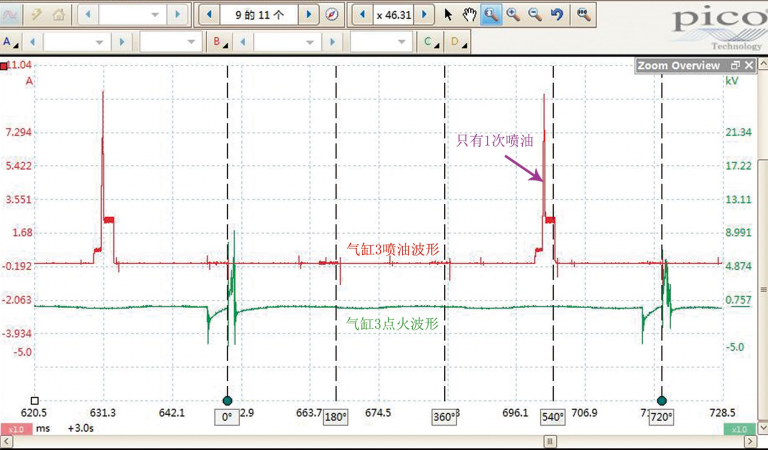
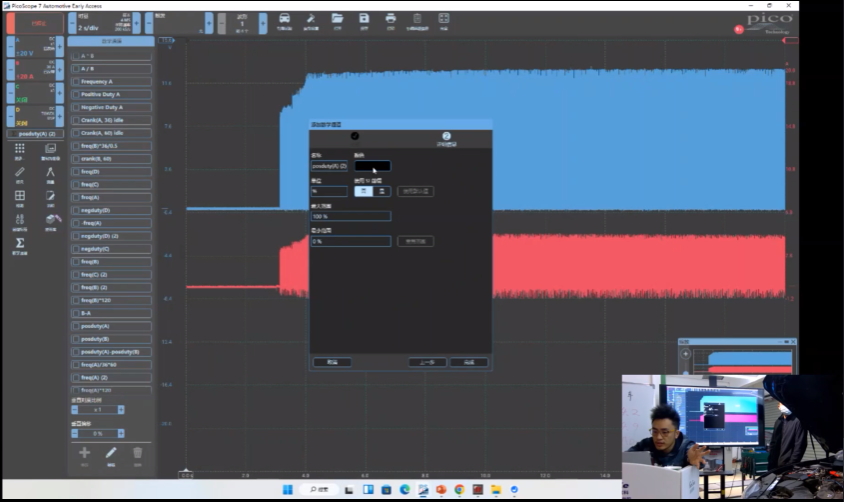
接上示波器,检测车况正常的同款车型的凸轮轴/曲轴位置传感器以及点火触发的信号:
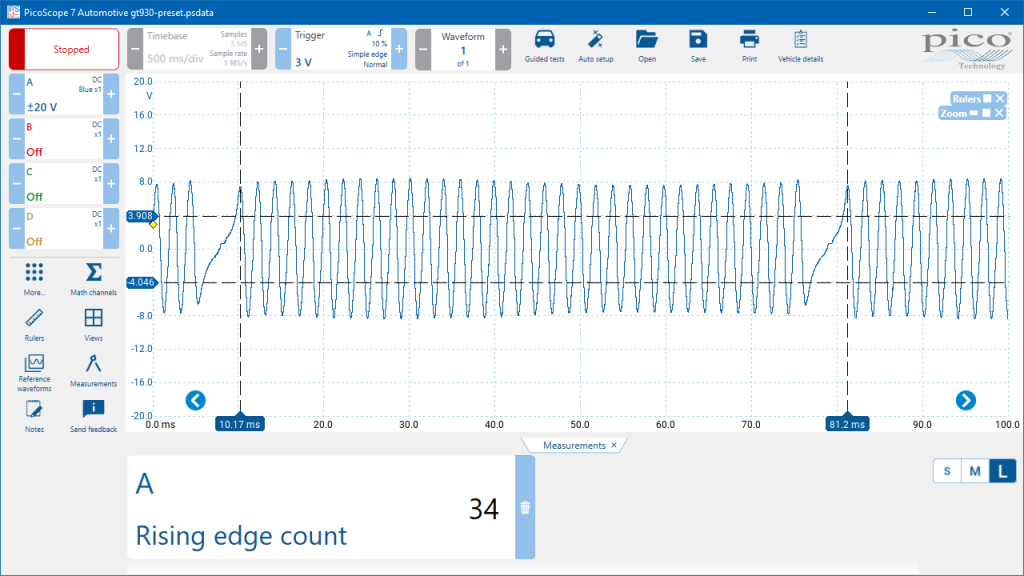
再检测故障车辆的凸轮轴/曲轴位置传感器以及点火触发的信号:
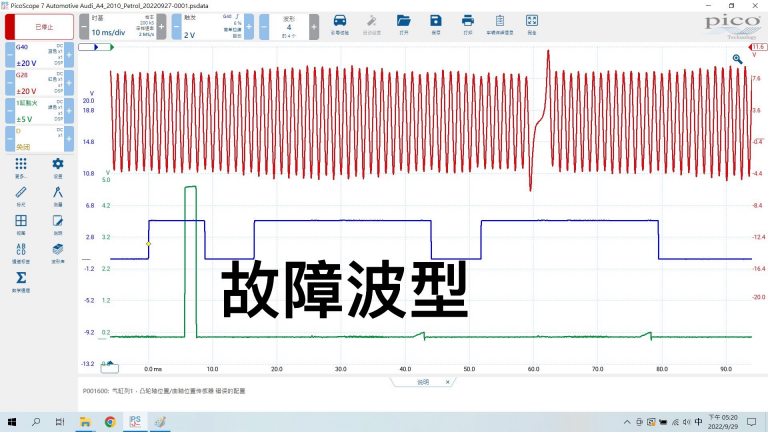
波形图一对比,故障原因就很明显可以看出了:故障车辆的正时信号波形和正常车辆的波形有明显的偏差,可以断定是发动机曲轴和凸轮轴的相对位置不对应。
故障排除
检查发动机的曲轴和凸轮轴相关零部件,原来是凸轮轴齿轮装配松动从而导致正时故障。
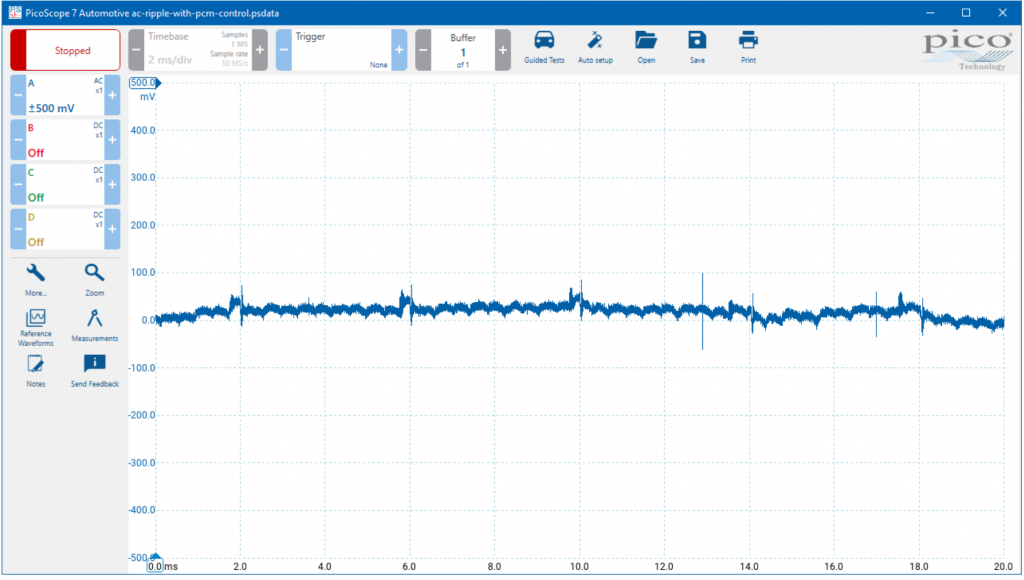
对于车辆的信号波形,我们鼓励用户,遇到任何车,都采集下来保存,以后再碰到同样的车,就能很直观的对比出故障原因了。
加入直播交流群,以技会友

加入直播交流群,以技会友






-473x1024.png)




-e1672212620949-658x1024.png)