搜索
产品
示波器套装
其它工具
为何选Pico示波器
Author Archives: qichebo
2.5.8 ASR(驱动防滑系统)
ASR,其全称是Acceleration Slip Regulation,即驱动防滑系统,其目的就是要防止车辆尤其是大马力车子,在起步、再加速时驱动轮打滑现象,以维持车辆行驶方向的稳定性。ASR可以通过减少节气门开度来降低发动机功率或者由制动器控制车轮打滑来达到对汽车牵引力的控制。装有ASR的车上,从油门踏板到汽油机节气门(柴油机喷油泵操纵杆)之间的机械连接被电控油门装置所代替,当传感器将油门踏板的位置及轮速信号传送至控制单元时,控制单元就会产生控制电压信号,伺服电机依此信号重新调整节气门的位置(或者柴油机操纵杆的位置),然后将该位置信号反馈至控制单元,以便及时调整制动器。
当汽车行驶在易滑的路面上时,没有ASR的汽车加速时驱动轮容易打滑,如果是后驱动轮打滑,车辆容易甩尾,如果是前驱动打滑,车辆方向容易失控。有ASR时,汽车在加速时就不会有或能够减轻这种现象。在转弯时,如果发生驱动轮打滑会导致整个车辆向一侧偏移,当有ASR时就会使车辆沿着正确的路线转向。总之,ASR可以最大限度利用发动机的驱动力矩,保证车辆起动、加速和转向过程中的稳定性。ASR与ABS的区别在于,ABS是防止车轮在制动时被抱死而产生侧滑,而ASR则是防止汽车在加速时因驱动轮打滑而产生的侧滑,ASR是在ABS的基础上的扩充,两者相辅相成。现在ASR还只安装在一些高档车上面,但是因为ASR与ABS包含着性能及技术上的贯通,所以有望近几年ASR变得与ABS一样普及。
2.5.7 LCA(变道辅助系统)
2.5.6 EBD(电子制动力分配)
ABS必须在踩下刹车至车轮抱死时才发挥作用,而EBD可以在踩下制动踏板后、在ABS起作用之前通过调节后轮制动力达到良好的制动效果,以减少不必要的ABS动作,或在ABS因特殊的故障状态而失效时防止车轮抱死,增大了保护范围。广州本田所有车型均装备有先进的“ABS+EBD”电子制动控制系统。EBD能够在汽车制动时自动调节前、后轴的制动力分配比例,并配合ABS提高制动稳定性。汽车在制动时,四只轮胎与地面的摩擦力不一样,容易造成打滑、倾斜和车辆侧翻事故。EBD用高速计算机分别对四只轮胎附着的不同地面进行感应与计算,根据不同的情况用不同的方式和力量制动,并不断调整,保证车辆的平稳、安全。
2.5.5 VSA(车辆稳定性控制系统)
2.5.4 ESP(电子稳定装置)
2.5.3 TCS(牵引力控制系统)
2.5.2 AWS(意外事故预防和缓和的驾驶辅助系统)
AWS是Advance Warning System缩写。是一个意外事故预防和缓和的驾驶辅助系统,在危险发生前给驾驶员提供及时的声音和视觉报警。公路交通事故已成为全球范围内日益严重的公共安全问题。统计资料表明,其中驾驶员的人为因素导致的公路交通事故率最高。无论是事故数量。还是伤亡人数均分别高达各自总数的90%左右。并且。在导致这些公路交通事故的驾驶员的人为因素中,疲劳和精神分散驾驶是重要原因之一。驾驶员在3s时间内的注意力不集中,造成了其中80%的交通事故,主要表现为车道偏离和追尾事故。 国内外在防止车道偏离和保持安全车距两个方面都开展了相当多有益的探索,在雷达、激光、超声波、红外线、机器视觉等传感器技术方面都取得了一些突破。经过长期大量的研究实践,人们逐步认识到采用单目视觉技术,仅使用一台摄像机,即能在一定程度上实现对前方道路环境、车辆探测及车距监测的功能。 研究显示,若在公路交通事故发生前的1.5s给驾驶员发出预警,则可避免90%的这类事故。因此,通过在汽车上安装汽车碰撞预警系统,利用技术手段分析车道、周围车辆的状况等驾驶环境信息,一旦当驾驶员发生疲劳及精神分散、汽车出现无意识的车道偏离及汽车间车距过近。存在追尾可能时。能够及时给予驾驶主动预警,是减少公路交通事故行之有效的技术措施。
2.5.1 ABS(防抱死系统)
(1)工作原理
在制动时,ABS根据每个车轮速度传感器传来的速度信号,可迅速判断出车轮的抱死状态,关闭开始抱死车轮上面的常开输入电磁阀,让制动力不变,如果车轮继续抱死,则打开常闭输出电磁阀。
这个车轮上的制动压力由于出现直通制动液贮油箱的管路而迅速下移,防止了因制动力过大而将车轮完全抱死。在让制动状态始终处于最佳点(滑移率S为20%),制动效果达到最好,行车最安全。
在制动总泵前面腔内的制动液是动态压力制动液,它推动反应套筒向右移动,反应套筒又推动助力活塞从而使制动踏板推杆向右移。因此,在ABS工作地时候,驾驶员可以感觉到脚上踏板地颤动,听到一些噪音。
汽车减速后,一旦ABS电脑检测到车轮抱死状态消失,它就会让主控制阀关闭,从而使系统转入普通的制动状态下进行工作。
如果蓄压器的压力下降到安全极限以下,红色制动故障指示灯和琥珀色ABS故障指示灯亮。在这种情况下,驾驶员要用较大的力进行深踩踏板式的制动方式才能对前后轮进行有效的制动。
(2)作用
其实ABS最重要的功能并不是为了缩短制动距离,而是为了能够尽量保持制动时汽车的方向稳定性。制动防抱死系统起作用时,车轮与路面的摩擦属滚动摩擦,这会充分利用车轮与路面之间的最大附着力进行制动,从而提高制动减速度,缩短制动距离,但最重要的还是保证汽车的方向稳定性。
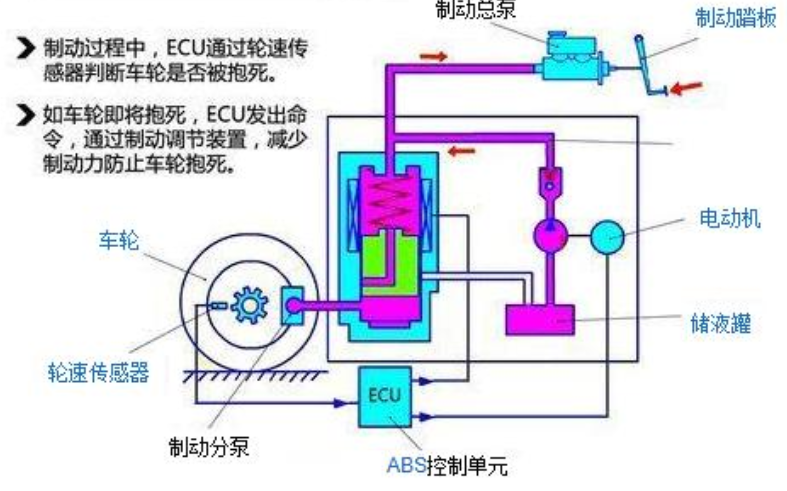
图2.5 ABS控制系统
2.4.4 FlexRay的节点有几个基本的运行状态
- 配置状态(默认配置/配置)-用于各种初始化设置,包括通信周期和数据速率。
- 就绪状态-用于进行内部的通信设置。
- 唤醒状态-用于唤醒没有在通信的节点。在该状态下,节点向另一节点发送唤醒信号,唤醒并激活总线驱动器、通信控制器、和总线监控器。
- 启动状态-用于启动时钟同步,并为通信做准备。
- 正常状态(主动/被动)-可以进行通信的状态。
- 中断状态-表明通信中断。